

 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ЙЄВЉЪПЛњЦїШЫММЪѕгаЯоЙЋЫОзїЮЊжЧФмЙЄГЇЗўЮёЩЬЃЌДгжЧФмжЦдьНтОіЗНАИЕФЬсЙЉЃЌЕНЙЄвЕЕчЦјВњЦЗЕФвЛеОЪНВЩЙКЃЌДгжЧФмжЦдьХрбЕЕНзЈвЕЮЌЛЄБЃбјЃЌЮЇШЦЩшБИЕФжЧФмЩ§МЖИФдьЁЂЩњВњМгЙЄЁЂЩшБИБЃеЯЁЂММФмХрбЕЕШЖрИіЗНУцЃЌЪЕЯжЩњВњЕФжЧФмЁЂИпаЇЁЂЛЗБЃКЭАВШЋЁЃ
жїгЊABBЁЂПтПЈKUKAЁЂАВДЈYASKAWAЁЂЗЂФЧПЦFANUCЁЂХЗЕиЯЃOTCЁЂДЈЦщKawasakiЁЂхлВЉAUBOЁЂЯжДњHYUNDAIЁЂЕчзАDENSOЁЂХЗФЗСњOMRONЁЂАЎЦеЩњEPSONЕШНјПк***ЛњЦїШЫЯюФПМЏГЩЁЂЛњЦїШЫДњРэЁЂЛњЦїШЫХфМўЁЂЛњЦїШЫЪлКѓЮЌБЃЁЂЛњЦїШЫХрбЕвЛеОЪНЗўЮёЁЃ
ЕижЗЃКЩЯКЃЪаМЮЖЈЧјВЉдАТЗ1333КХ1ЖА7Ву
-------------------------------------------------------------------------------------------------------------------
АЎЦеЩњЛњЦїШЫГЃгУаЭКХЃК
АЎЦеЩњЛњЦїШЫ G1ЁЂАЎЦеЩњЛњЦїШЫ G3ЁЂАЎЦеЩњЛњЦїШЫ G6ЁЂАЎЦеЩњЛњЦїШЫ G10ЁЂАЎЦеЩњЛњЦїШЫ G20ЁЂАЎЦеЩњЛњЦїШЫ RS3ЁЂАЎЦеЩњЛњЦїШЫ RS4ЁЂАЎЦеЩњЛњЦїШЫ LS3ЁЂАЎЦеЩњЛњЦїШЫ LS6ЁЂАЎЦеЩњЛњЦїШЫ LS20ЁЂАЎЦеЩњЛњЦїШЫ LS3-BЁЂАЎЦеЩњЛњЦїШЫ LS6-BЁЂАЎЦеЩњЛњЦїШЫ LS10-BЁЂАЎЦеЩњЛњЦїШЫ LS20-BЁЂАЎЦеЩњЛњЦїШЫ T3ЁЂАЎЦеЩњЛњЦїШЫ T6ЁЂАЎЦеЩњЛњЦїШЫ C3ЁЂАЎЦеЩњЛњЦїШЫ C4ЁЂАЎЦеЩњЛњЦїШЫ C8ЁЂАЎЦеЩњЛњЦїШЫ C12ЁЂАЎЦеЩњЛњЦїШЫ S5ЁЂАЎЦеЩњЛњЦїШЫ S5LЁЂАЎЦеЩњЛњЦїШЫ N2ЁЂАЎЦеЩњЛњЦїШЫ N6ЁЂАЎЦеЩњЛњЦїШЫ C12XLЁЂАЎЦеЩњЛњЦїШЫ VT6LЁЂАЎЦеЩњЛњЦїШЫ N6ЁЂАЎЦеЩњЛњЦїШЫ N2ЁЂАЎЦеЩњЛњЦїШЫ LS10ЁЂАЎЦеЩњЛњЦїШЫ T6ЁЂАЎЦеЩњЛњЦїШЫ T3ЁЂАЎЦеЩњЛњЦїШЫ WorkSenseW-01ЕШЁЃ
АЎЦеЩњЛњЦїШЫ G1ЁЂАЎЦеЩњЛњЦїШЫ G3ЁЂАЎЦеЩњЛњЦїШЫ G6ЁЂАЎЦеЩњЛњЦїШЫ G10ЁЂАЎЦеЩњЛњЦїШЫ G20ЁЂАЎЦеЩњЛњЦїШЫ RS3ЁЂАЎЦеЩњЛњЦїШЫ RS4ЁЂАЎЦеЩњЛњЦїШЫ LS3ЁЂАЎЦеЩњЛњЦїШЫ LS6ЁЂАЎЦеЩњЛњЦїШЫ LS20ЁЂАЎЦеЩњЛњЦїШЫ LS3-BЁЂАЎЦеЩњЛњЦїШЫ LS6-BЁЂАЎЦеЩњЛњЦїШЫ LS10-BЁЂАЎЦеЩњЛњЦїШЫ LS20-BЁЂАЎЦеЩњЛњЦїШЫ T3ЁЂАЎЦеЩњЛњЦїШЫ T6ЁЂАЎЦеЩњЛњЦїШЫ C3ЁЂАЎЦеЩњЛњЦїШЫ C4ЁЂАЎЦеЩњЛњЦїШЫ C8ЁЂАЎЦеЩњЛњЦїШЫ C12ЁЂАЎЦеЩњЛњЦїШЫ S5ЁЂАЎЦеЩњЛњЦїШЫ S5LЁЂАЎЦеЩњЛњЦїШЫ N2ЁЂАЎЦеЩњЛњЦїШЫ N6ЁЂАЎЦеЩњЛњЦїШЫ C12XLЁЂАЎЦеЩњЛњЦїШЫ VT6LЁЂАЎЦеЩњЛњЦїШЫ N6ЁЂАЎЦеЩњЛњЦїШЫ N2ЁЂАЎЦеЩњЛњЦїШЫ LS10ЁЂАЎЦеЩњЛњЦїШЫ T6ЁЂАЎЦеЩњЛњЦїШЫ T3ЁЂАЎЦеЩњЛњЦїШЫ WorkSenseW-01ЕШЁЃ
вЛЁЂАбЪгОѕФЃаЭЗХШыЯрЛњЪгвАЃЌ ШЛКѓЕїећЯрЛњЪЙЯрЛњЕУЕНЧхЮњЭМЯёЃЌ ШЛКѓЕЅЛї “ ”ЭМБъЃЌ ШЛКѓдйЪгвАЗЖЮЇФкЕЅЛїЃЌ ГіЯжЖўИізЯЩЋЗНПђШчЯТЭМЫљЪОЃЌ ЭтПђЮЊЫбЫїЗЖЮЇЃЌ ФкПђЮЇФЃАхЬиеїГщШЁЁЃ
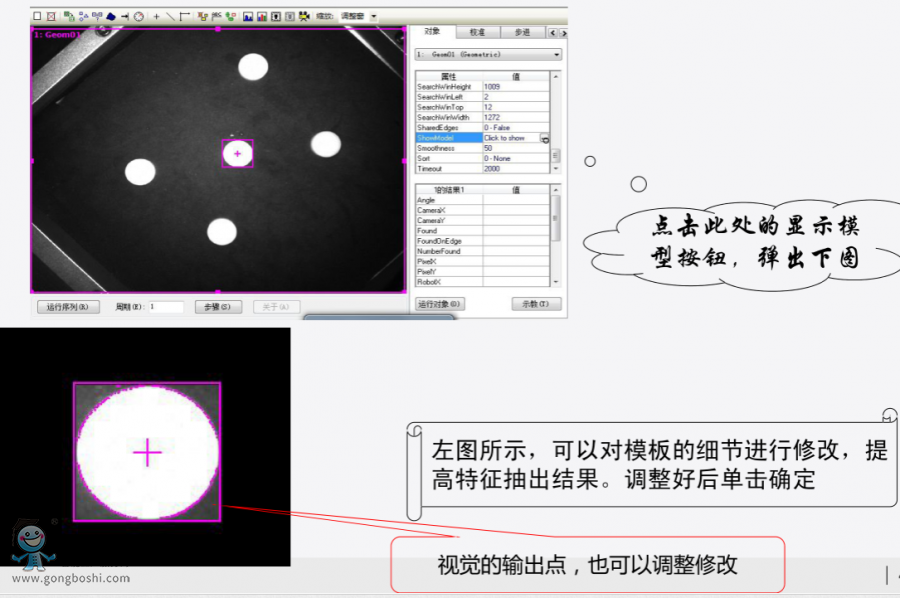
ЖўЁЂЕїећЪгвАЗЖЮЇКЭФЃАхЬиеїГщШЁЗНПђЃЌ ЕїећФЃАхЬиеїДАПкЪБПЩНЋЫѕЗХЕїжЦКЯЪЪЕФжЕШЛКѓдйЖдФЃАцЬиеїДАПкНјааЯИЮЂЕїећЃЌ ЕїећКУКѓЕЅЛї“ЪОНЬ”

Ш§ЁЂЕуЛїЯТЭМЕФЯдЪОФЃаЭАДХЅ
ЫФЁЂНЈСЂКУФЃАцКѓЩшжУФЃАцЕФЪєадЃЌ АќРЈФЃАцУћГЦЃЌ ЦЅХфЖШЃЌ ЫбЫїИіЪ§ЕШЃЌ ШЛКѓЕЅЛїдЫааЖдЯѓЃЌ ВтЪдФмЗёевЕНФЃАцЃЌ ВЛФмЕФЛАжиаТЩшжУЪєадЃЌ ШЛКѓдйдЫааЖдЯѓ

ЮхЁЂађСаМАЖдЯѓЪєадЩшжУ
1. ађСаГЃгУЪєадЩшжУ
1ЃЉ calibration
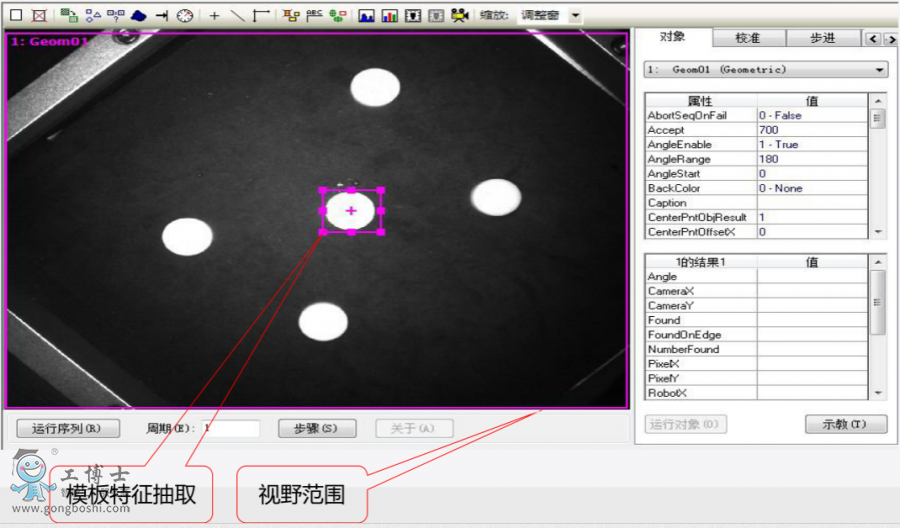
ЩшжУаЃзМБрКХЃЌ МДИУађСаЗДРЁЕФЛњЦїШЫзјБъвдЩшЖЈЕФаЃзМЮЊВЮПМ
2ЃЉ Camera
ЩшЖЈЯрЛњЭЈЕРКХ
3ЃЉ Name
ЩшЖЈађСаУћГЦЃЌ гУгкЪгОѕзгГЬађЕїгУжИСюжа
2 МИКЮЖдЯѓГЃгУЪєадЩшжУ
1ЃЉ Accept
ЦЅХфжЕЩшЖЈЃЌ ЩшЖЈжЕдНИпвЊЧѓЭМЯёгыФЃАцЕФЦЅХфГЬЖШдНИпЃЌ ФЌШЯжЕЮЊ700ЃЌ ***Дѓ100
2ЃЉ ModelOrgAutoCenter
ФЃАцжааФЩшЖЈЃЌ ЩшжУЮЊTureЪБздЖЏЛёШЁФЃАцжааФЮЛжУЃЌ ЩшжУЮЊFalseЪБПЬвЦЖЏжааФЃЌ ФЌШЯЮЊFalse
3ЃЉ Number ToFind
ЩшжУЫбЫїЩЯЯоИіЪ§

СЫНтИќЖрАЎЦеЩњЛњЦїШЫ